Robot UR3
Esta versión más reducida del UR5, presenta los mismos rasgos de programación, aplicaciones colaborativas y funcionamiento.
Su principal característica es su eje 6 pose rotación infinita, lo que lo hace muy útil para sistemas de ensamblaje y atornillado sobre mesa de trabajo.


Características
Su tamaño reducido es ideal para aplicaciones dentro de maquinaria o en espacios de trabajo muy pequeños.
| Carga | 3kg |
| Rango máximo | 500mm |
| Precisión | 0.1mm |
| Peso | 11kg |
| Nº articulaciones | 6 |
Pinza RG2 ONROBOT
Este sistema de agarre de Onrobot, permite una fácil integración con los robots UR. Tiene un diseño Plug-and-Produce, se reduce el tiempo de implantación y de cambio de manipulador.
La pinza colaborativa RG2 permite la personalización de las puntas. Un gran recorrido, mostrar indicaciones de agarre, ajuste de fuerza y recorrido, cálculo automático del TCP (en UR), compensación de profundidad automática (en UR) y cálculo automático de la carga útil (en UR).
Estas prestaciones otorgan al sistema de las características necesarias para aplicaciones de empaquetado y paletizado, mantenimiento de maquinaria, montaje y Pick & Place.

Mano robótica qb SoftHand
qb SoftHand es una mano robótica antropomorfa a escala 1:1 basada en la tecnología soft-robotics. Es flexible, adaptable y capaz de interactuar con el entorno próximo limitando, al mismo tiempo, el riesgo de dañar a los operadores, estropear los productos que se van a manipular o el daño al propio robot.
El qb SoftHand es adaptable y puede agarrar diferentes objetos sin ningún cambio en la acción de control, mostrando un nivel incomparable de simplicidad y flexibilidad.
Gracias a la cobertura de material suave, la mano de qbrobotics explota los principios de las sinergias en un diseño simple e intrínsecamente inteligente. Asegura la interacción hombre-robot y también se adapta para sujetar diferentes objetos sin ningún cambio en la acción de control.
Su dispositivo de agarre flexible puede agarrar una gran variedad de objetos. El accionamiento con un solo driver hace que la mano sea plug-and-play y fácil de controlar (un solo driver requiere una sola señal de control para cerrar y abrir toda la mano).

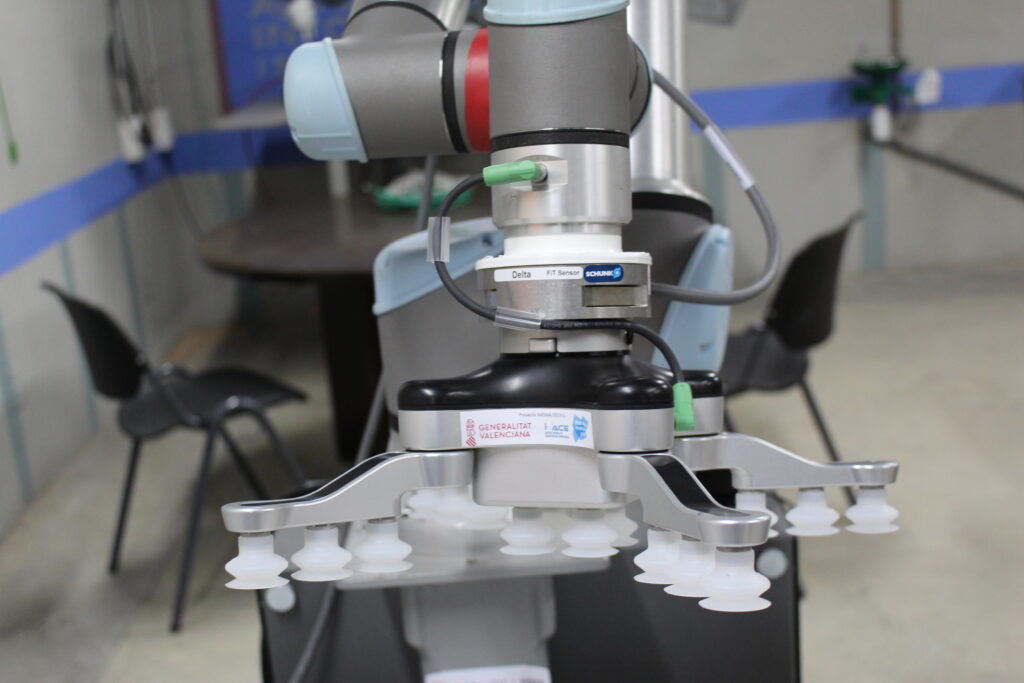
Pinza vacío VG10
La pinza VG10 no requiere compresor ni suministro de aire, es compacta y fácil de mover, lo que proporciona flexibilidad en su línea de producción. La configuración de los brazos flexibles de la pinza de vacío VG10 y el vacío ajustable permiten que la VG10 pueda manipular una gran variedad de objetos de diferentes tamaños.
La pinza viene con funcionalidad de doble agarre, cambiador de herramientas y una variedad de ventosas típicas. Además, hay una amplia variedad de ventosas de terceros disponibles en el mercado.
La pinza de vacío VG10 es una solución “Plug & Produce”. Trabaja directamente desde la caja y en su línea de producción en menos de 30 minutos.
La perfecta integración con Universal Robots y la compatibilidad con interfaces de robot genéricas hacen que la VG10 sea ideal para todo tipo de robots. A partir de mediados de febrero de 2019, también soporta los robots KUKA, Kawasaki, FANUC, Techman, Doosan, NACHI y Yaskawa.